超低價打造mearm Ver1.0 機械手臂 PART1
培英國中的同學們,如果你要看影片教學,請直接滑到網頁最下方
請注意!每個人有三顆螺絲還在教室中,之後記得把剩下的材料領回去才能把手臂組裝完喔!
然後因為這次使用的雷切機因為公差不同所致,所以有些螺絲的鎖法會跟網頁的教學有一點差異,所以請你們直接看影片就好了
(2018.1.31)
mearm-從以前到現在在maker中都是很火紅的機械手臂,因為它簡單、製作成本低,而且很適合用來作為教學的教本。大家google一下就可以看到網路上早已遍布許多的教學平台,都有提供mearm的製作過程,圖片上也可以看到,連機械手臂本身都多出了好幾個版本,有些人把原作稍微修改,所以mearm本身也不斷地在升級。

那在進入教學前呢,我要先介紹一下mearm的結構
大致上可以分為三個部分:機械手臂、主機板、控制板。
而我們要先來做機械手臂
3.伺服馬達 x 4
基座

左右轉向馬達
上下轉向馬達


前後轉向馬達


上臂座



上臂


組合一

前臂

夾子



組合二
大功告成
(照片中基板角落是沒有洞的,所以我後來又去鑽了四個洞,但是只要你是用我修過的圖檔,角落就會有四個洞給銅柱鎖)
請注意!每個人有三顆螺絲還在教室中,之後記得把剩下的材料領回去才能把手臂組裝完喔!
然後因為這次使用的雷切機因為公差不同所致,所以有些螺絲的鎖法會跟網頁的教學有一點差異,所以請你們直接看影片就好了
(2018.1.31)


那我今天要來跟大家分享一下我參考了網路上一些人的做法,並且做了一些的修改。
首先這是我做好的成品,大家可以上網查一下各方的製作,絕對大多是用Arduino UNO做的,而且還要配備搖桿擴充板,總共加加也要千元起跳。但是我採用Arduino nano並且自己和電路板和自製搖桿電路,將價格壓到500元以下,那在這裡我會詳細的介紹我是如何做出這些電路以及我針對mearm Ver1.0做出了哪些修改。
 |  |
那在進入教學前呢,我要先介紹一下mearm的結構
大致上可以分為三個部分:機械手臂、主機板、控制板。

機械手臂
| 
主機板
| 
控制板
|
而我們要先來做機械手臂
準備材料:
1.壓克力板 300X200X3mm 一片
該原圖檔由phenoptix 繪製,原圖位於:https://www.thingiverse.com/thing:993759
2.各類螺絲及銅柱
M3(公制)(如果有發現螺絲數量有誤,請告知我謝謝)| 螺帽 銅柱螺絲 10mm 十字螺絲 6mm 十字螺絲 8mm 十字螺絲 10mm 十字螺絲 12mm 十字螺絲 20mm | x 14 x 4 x 6 x 12 x 7 x 7 x 4 |
3.伺服馬達 x 4


 |  | | |
準備工具:
1.十字螺絲起子一把(484很簡單啊)
記得要符合螺絲的軸徑(M3 = 3mm)
開始製作
第一步:組裝(我當大家都已經先雷切好圖檔囉)
 | 💨 |  |
⇩
| ||
 | ||
 |
| 所有雷切出來的部件 (這是thingiverse上的圖檔,被我改的檔案中左上角的底板周圍跟中間會各有四個洞 |
 |
| 螺絲尺寸對照 |
 |
| 20mm x 4、螺帽 x 4 |

 |
| 8mm x 2 |
 |
| 先不要鎖住,先對準 |
 |
| 塞入馬達 |
 |
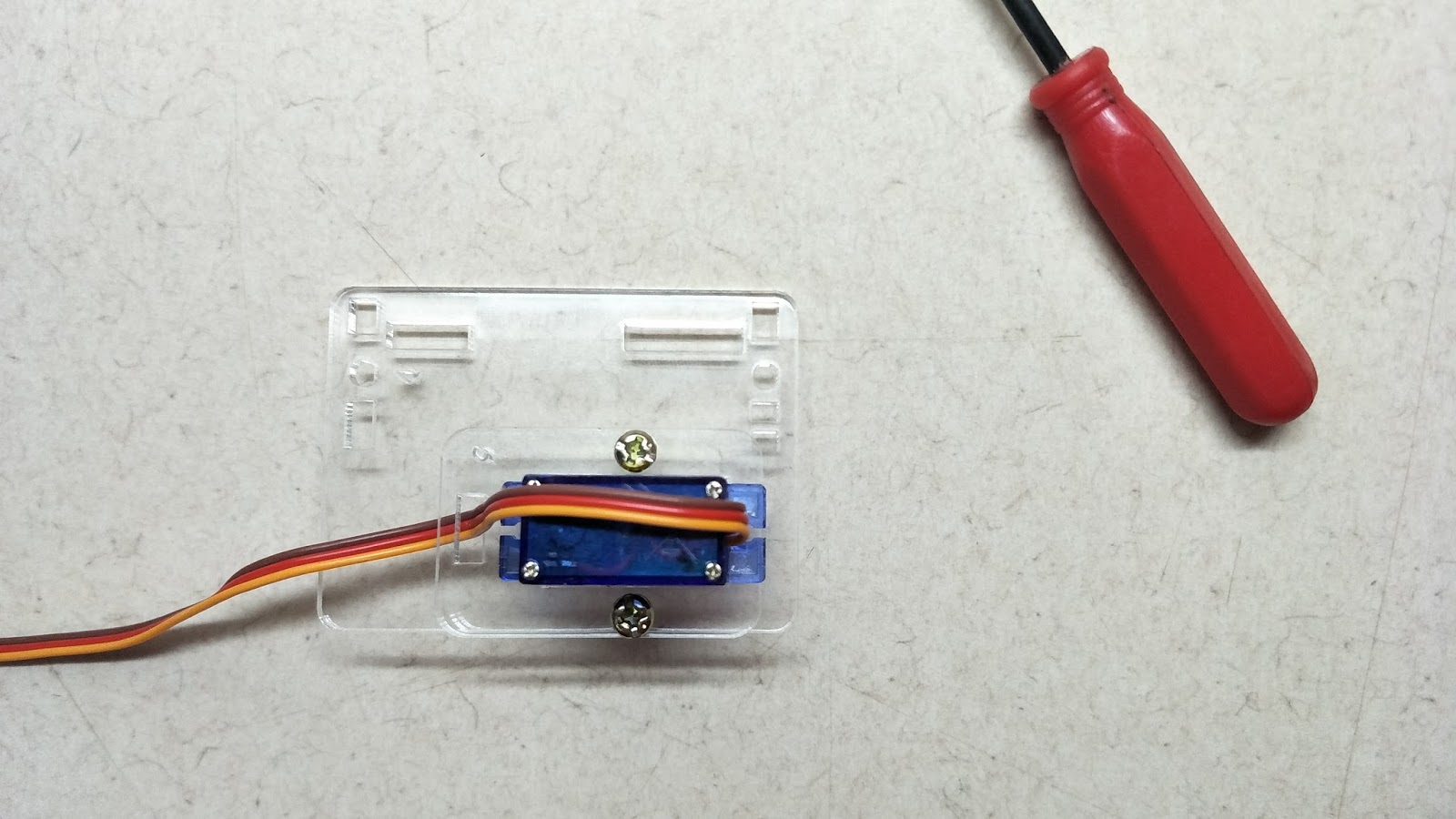
| 以這樣的方向將馬達插入馬達底板並鎖上8mm x 2的螺絲 (馬達板在前,馬達在後) |
 |
| 最後鎖上基板上的四顆螺絲 |
 |
| 8mm x 2、伺服馬達附的3個螺絲及一字軸 |

 |
| 白色轉軸的突起軸心朝下塞入洞中 |
 |
| 以平行馬達的方向插入馬達軸心並鎖上最小的螺絲 |
 |
| 8mm x 2、6mm x 1、伺服馬達附的3個螺絲及一字軸 |

 |
| 側板在前,馬達在後,鎖上8mm x 2螺絲 |

 |
| 一字軸突起朝上插入洞中 |
 |
| 長棍在前,側板在後(長棍與馬達在同側),用6mm螺絲鎖上 |
 |
| 請以垂直於馬達方向將長棍插入馬達軸心鎖上小螺絲 (圖片有誤,長棍稍微偏了) |
 |
| 10mm x 1、伺服馬達附的2個螺絲及一字軸 |
 |
| 短轉軸在上,長轉軸在中,中間板在下,10mm螺絲從底下往上鎖 |

 |
| 12mm x 2、螺帽 x 2 |

 |
| 注意方向 |
 |
| 鎖上12mm螺絲 |

 |
| 鎖上12mm螺絲 |
 |
| 10mm x 1 |

 |
| 12mm x 4、螺帽 x 4 |

 |
| 鎖上12mm x 2 的螺絲 (左上螺絲不要理它,不小心拍到的) |

 |
| 鎖上小螺絲 |
 |
| 6mm x 2 |

 |
| 10mm x 2、6mm x 1 |
 |
| 鎖上10mm螺絲一個 (三角板在前,長棍在中,上臂末在後) |
 |
| 同上圖,換個視角 |
 |
| 牛角朝左插入兩邊的長棍中 |
 |
| 鎖上10mm(注意中間有小圓墊片)、6mm螺絲 |
 |
| 8mm x 6、12mm x 1 |



 |
| 注意方向 |
 |
| 同上圖,另一面 |
 |
| 鎖上8mm x 4 螺絲 |
 |
| 上面的螺絲是12mm,下面的是8mm(上面的半夾有洞,下面無) (注意!!!這裡壓克力板有三層,見下圖) |
 |
| 上層為固定板,中層為夾子,下層為馬達板 |
 |
| 將大齒輪軸心鎖在原來12mm的螺絲上 並用8mm螺絲在另一端鎖在有洞的半夾上 |
 |
| 伺服馬達附的2個螺絲及白色半軸 還有6mm x 2(忘記拍到了) |
 |
| 注意方向 |
 |
| 先將馬達逆時針轉到底,將夾子閉緊,從白色半軸以逆時針數來第二個齒牙要剛好卡在緊閉的夾子齒牙上(有點複雜) |
 |
| 這張動圖應該會比較好懂吧 |
 |
| 用6mm x 2螺絲鎖上半齒輪 |
 |
| 10mm x 3 |
 |
| 中間注意有小圓墊片 |
 |
| 右面 |
 |
| 左面(以上兩張圖的螺絲都不好鎖,要小心) |
 |
| 記得要在基板的四個角落中裝上銅柱及螺帽 |
(照片中基板角落是沒有洞的,所以我後來又去鑽了四個洞,但是只要你是用我修過的圖檔,角落就會有四個洞給銅柱鎖)
- 以下是製作過程的詳細影片:
- 組裝好機械手臂後,將電路板裝上:
- 這是機械手臂的使用方法:
=================================================


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
很讚!
回覆刪除